DDG Lecture 6
Exterior Derivative
two big ideas in calculus: differentiation vs. integration.
linked by fundamental theorem of calculus.
Exterior calculus:
- differentiation of k-forms (exterior derivative)
- integration of k-forms (measure volume)
- linked by Stoke's Theorem
Goal: integrate over meshes to get discrete exterior calculus.
Motivation for exterior calculus.
Why generalize vector calculus?
- Hard to measure change in volume
- Duality clarifies distinction between different concepts/quantities.
- Topology: notion of differentiation doesn't require metric (e.g. cohomology)
- Geometry: clear language for calculus on curved surfaces.
- Physics: clear distinction between physical quantities (e.g. velocity vs. momentum)
- CS: leads directly to discretization
Exterior Derivative
Derivative as limit, slope, tangent plane, "best linear approximation".
Vector derivatives: gradient R→Rn, divergence Rn→R, curl Rn→Rn
In coordinates:
ϕ:Rn→R
X=u∂x∂+v∂y∂+w∂z∂
where u,v,w:Rn→R are coordinate functions and ∂x∂,∂y∂,∂z∂ are the basis vector fields.
defn:
grad
∇ϕ=∂x∂ϕ∂x∂+∂y∂ϕ∂y∂+∂z∂ϕ∂z∂
div
∇⋅X=∂x∂u+∂y∂v+∂z∂w
curl
∇×X=(∂y∂w−∂z∂v)∂x∂+(∂z∂u−∂x∂w)∂y∂+(∂x∂v−∂y∂u)∂z∂
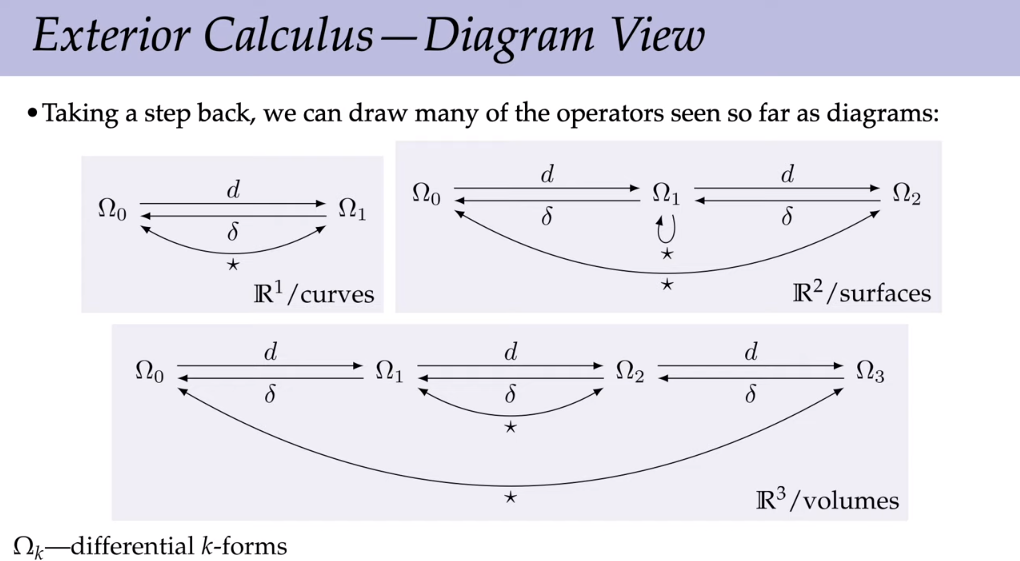
The Exterior Derivative
Let Ωk denote the space of all differential k-forms.
Unique linear map d:Ωk→Ωk+1 such that
- differential : for k=0, dϕ(X)=DXϕ
- take the "directional derivative of ϕ along X
- product rule : d(α∧β)=dα∧β+(−1)kα∧dβ
- exactness : d∘d=0
Exterior Derivative -- Differential
review: Directional Derivative
defn The directional derivative of a scalar function ϕ at a point p with respect to a vector X is the rate at which that function increases as we walk away from p with velocity X.
DXϕ∣p:=ϵ→0limϵϕ(p+ϵX)−ϕ(p)
This is trivially extended to X vector field instead of at point p by applying previous definition pointwise.
The result is a scalar function.
Gradient:
⟨∇ϕ,X⟩=DXϕ ∀X
i.e the gradient is the unique vector field ∇ϕ whose inner product with any vector field X yields the directional derivative along X. (Note: depends on defn of inner product.)
Differential of a function
0-forms are scalar functions.
Change in a scalar function can be measured via the differential.
Two ways to define differential:
- As unique 1-form such that applying any vector field gives directional derivative along those directions.
- dϕ(X)=DXϕ
- In coordinates:
- dϕ:=∂x1∂ϕdx1+⋯+∂xn∂ϕdxn
Conceptually similar to the gradient.
| grad | differential |
|---|
| ⟨∇ϕ⟩=DXϕ | dϕ(X)=DXϕ |
what's the difference?
- type: vector field vs. differential 1-form
- dependence on inner product.
- dϕ(⋅)=⟨∇ϕ,⋅⟩
- we have no dependence on geometry for differential.
(dϕ)♯=∇ϕ⟺dϕ(⋅)=⟨∇ϕ,⋅⟩⟺(∇ϕ)♭=dϕ
Exterior Derivative -- Product Rule
Q: why is it true that ab = ba for a,b in R
rectangle area implies commutativity.
Preduct rule of differentiation of real functions.
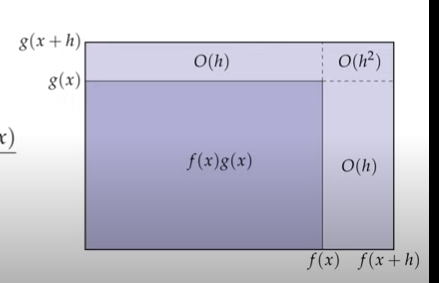
(We neglect the O(n^2) term as differentiation is linear approximation on crack.)
let α be a k-form and β be an l-form. Then
d(α∧β)=(dα)∧β+(−1)kα∧(dβ)
Recursive evaluation of differential form
Ex. Let α:=udx, β:=vdy, γ:=wdz be differential 1-forms on Rn.
where u,v,w:Rn→R are 0-forms. Also, let ω:=α∧β. Then,
d(ω∧γ)=(dω)∧γ+(−1)2ω∧(dγ)=[(dα)∧β−α∧(dβ)]∧γ+(−1)2ω∧(dγ)=(dα)∧β∧γ−α∧(dβ)∧γ+α∧β∧(dγ)
Note,
dα=(du)∧dx+u(ddx)
Therefore,
d(ω∧γ)=(dα)∧β∧γ−α∧(dβ)∧γ+α∧β∧(dγ)=(du∧dx)∧β∧γ−α∧(dv∧dy)∧γ+α∧β∧(dw∧dz)
Ex. Let ϕ(x,y):=21e−(x2+y2). Then
dϕ=∂x∂ϕdx+∂y∂ϕdy=−2ϕ(xdx+ydy)
Ex. Let α(x,y)=xdx+ydy . Then.
dα=(∂x∂xdx+∂y∂xdy)∧dx+(∂x∂y+∂y∂y)dy=dx∧dx+dy∧dy=0
Ex. Let α as above, then d⋆α
d⋆α=d(⋆(xdx+ydy))=d(xdy−ydx)=dx∧dy−dy∧dx=2(dx∧dy)
Exterior Derivative -- Exactness
d∘d=0
Q: let α=udx+vdy+wdz where u,v,w:R3→R. What is dα?
A:
dα=d(udx+vdy+wdz)=du∧dx+u∧d(dx)+dv∧dy+v∧d(dv)+dw∧dz+w∧d(dz)=du∧dx+dv∧dy+dw∧dz=∂y∂u(dy∧dx)+∂z∂u(dz∧dx)+∂x∂v(dx∧dy)+∂z∂v(dz∧dy)+∂x∂w(dx∧dz)+∂y∂w(dy∧dz)=(∂x∂v−∂y∂u)dx∧dy+(∂y∂w−∂z∂v)dy∧dz+(∂z∂u−∂x∂w)dz∧dx
Vaguely reminiscent of the cross product.
Thus reminiscent of curl.
Curl
Let X:=u∂x∂+v∂y∂+w∂z∂.
Then
∇×X≅dα=(∂x∂v−∂y∂u)dx∧dy+(∂y∂w−∂z∂v)dy∧dz+(∂z∂u−∂x∂w)dz∧dx
In other words, ∇×X=(⋆dX♭)♯
Divergence
Ex. Let ambient space be R3. Let α as before. What is d⋆α?
d⋆α=d(⋆(udx+vdy+wdz))=d(udy∧dz+vdz∧dx+wdx∧dy)=du∧dy∧dz+dv∧dz∧dx+dw∧dx∧dy=∂x∂udx∧dy∧dz+∂y∂vdy∧dz∧dx+∂z∂wdz∧dx∧dy=(∂x∂u+∂y∂v+∂z∂w)dx∧dy∧dz
Vaguely reminiscent to the dot product or the divergence.
i.e ∇⋅X=⋆(d⋆X♭)
Define the codifferential δ:=⋆d⋆.
Exterior vs. Vector Derivatives
| grad | div | curl |
|---|
| gradϕ | div X | curl Y |
| (dϕ)♯ | ⋆d(⋆X♭) | (⋆(dY♭))♯ |
Laplacian
Δ=∇⋅∇
or:
Δ=⋆d⋆d
We can generalize to k-forms:
Δ:=⋆d⋆d+d⋆d⋆