Discrete Differential Geometry 3
DDG Week 3
Exterior Calculus
Why?
- Talk about signed volume
- Geometry -> Algebraic Geometry
- Geometric algebra (Clifford algebra, spin physics)
- Physics
- massless quantitiies are vectors
- massive quantities are forms
discrete exterior calculus (DEC)
Work from linear algebra and vector calculus to Exterior Algebra and Exterior Calculus.
DEC -> Discretize all the above.
motivation: do cool stuff like solve PDEs on meshes.
Concepts:
- Poisson
- Helmholtz-Hodge
- homology
- cohomology
Applications:
- smoothing
- distance
- vector field
- parameterization
- meshing
Wedge Product
span: the subspace that is a linear combination of the vectors.
Defn: In a vector space , the span of a finite set of vectors is the set of all linear combinations:
Wedge product:
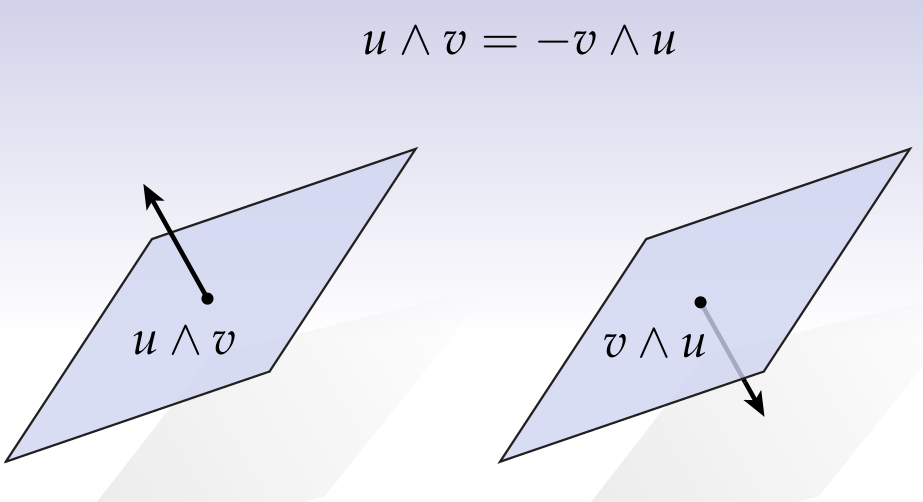
Oriented finite extent. Anti-symmetric.
note:
The resulting object is a k-vector.
- 0-vector ?
- 1-vector
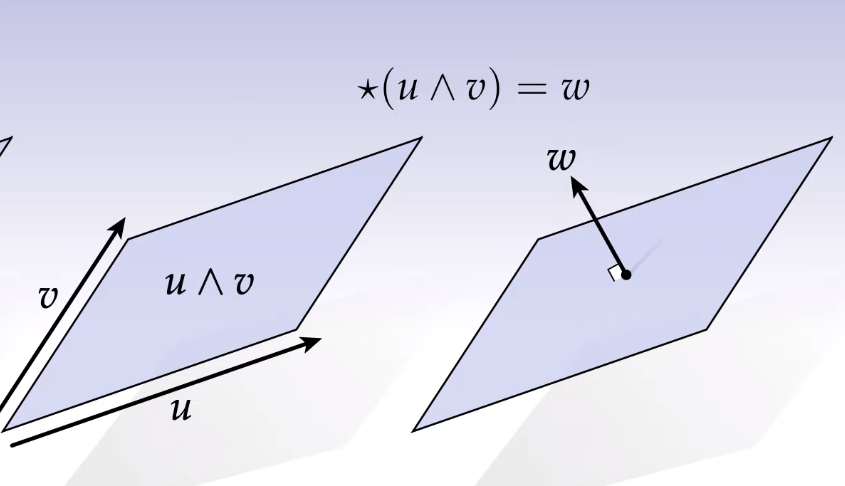
- 2-vector -> parallelogram (direction + magnitude)
- 3-vector -> volume + direction?
A k-vector with the same area and orientation is equivalent. Any "patch" with the same area and normal is equivalent.
For convenience, say a 0-vector is a scalar.
Hodge Star
Orthogonal Compliment:
Defn Let be a linear subspace of a vector space with an inner product . The orthogonal compliment of is the collection of vectors.
With a compliment, we can say things like "X except Y".
convention: is positively oriented.
The 2-form is the "oriented planar segment" whereas the hodge star of a 2-vector gives us the normal to the surface (in ).
Coordinate Representation
Like the basis of linear algebra, we can find the basis of by thinking of the wedges:
e.g. in
The wedges are omitted, so in general only are considered. Also, with 3-vectors we have:
so the same general rule applies where we take all permutations such that . We get basis k-vectors for a vector space .